CUVIS-Joint 機器人手術系統不僅僅是開刀,也是一套全流程膝關節手術方案。
您知道機器人輔助手術是如何進行的嗎?我們將繁瑣的醫療過程簡化為五個核心階段。透過透明化的流程解析,帶您認識從:術前 CT 評估、3D 模擬規劃,到精準切骨與植入關節的完整流程。

步驟 1:患者向醫師諮詢
步驟 2:CT電腦斷層掃描
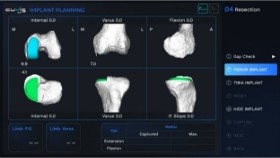
步驟3:術前計劃
TKA (全膝關節置換手術)
FMA, TMA setting
Mechanical axis setting between Femur and Tibia
Rotation
Image based External Rotation setting of patient’s bone
Implant Selection
Virtual Surgery
A virtual check of postoperative alignment of patient’s leg (Femur/Tibia)
* FMA : Femoral Mechanical Axis / TMA : Tibia Mechanical Axis
THA (全髖關節置換手術)
Femoral Head Setting
Position/size setting of Femur Head
Femur Cavity Adjustment & Alignment
Alignment for implant insertion
Implantation
Mechanical axis setting between Femur and Tibia
Synthetic X-Ray
A check of implant insertion state after virtual X-ray surgery
* FMA : Femoral Mechanical Axis / TMA : Tibia Mechanical Axis

步驟4:實施手術

步驟5:植入人工關節
CUVIS-Joint 是一套先進的「主動式」關節置換輔助系統。
與傳統手術依賴醫師手感切骨不同,CUVIS-Joint 透過術前 CT 電腦斷層掃描進行 3D 手術模擬,為每位患者量身規劃最佳的植入位置 。
在手術中,機器手臂會依據規劃數據,執行 高精準度的主動式切削 (Automatic Milling),將人為誤差與手部震顫降到最低,實現傳統手持器械難以達到的次毫米級 (Sub-millimeter) 精準度。
請放心,手術全程仍由您的主治醫師主導與監控。
所謂「主動式」是指機器手臂能根據規劃路徑,主動協助醫師執行最關鍵的「切骨」步驟,而非僅是被動限制範圍。這種技術能減少對骨骼不必要的微小損傷。
雖然機器負責執行精準動作,但醫師全程握有控制權。系統配備了 實時監控 (Real-time monitoring)、緊急停止 (Emergency Stop) 與 手動引導 (Manual Guide) 等多重安全機制,確保手術在絕對安全的情況下進行 。
讓手術流程輔助醫師主動執行關鍵且複雜的骨骼處理步驟,而不僅僅是導引方向。傳統或半主動式機器人通常只負責「定位」,醫師仍需手持電鋸進行切割。
CUVIS-Joint 則實現了智能輔控 全流程主動切削 (Fully Automated Cutting),機械手臂能依照醫師術前 3D 計劃,協助磨切股骨與脛骨,甚至連傳統手術較難以精準處理的 插銷孔 (Peg Hole) 與 龍骨槽 (Keel) 都做到一次完成,過程中完全不需要使用傳統的切骨導板 (Jigs)。
根據臨床經驗與數據,CUVIS-Joint 機器人手術能帶來以下優勢:
較少的疼痛與出血:
機器人精準的切削能減少對周邊軟組織的破壞,進而降低出血量與術後疼痛感。
較快的復原速度:
由於骨骼與組織損傷較小,有助於縮短術後恢復期,許多患者在術後隔天即可達到良好的膝關節活動角度。
減少併發症風險:
機器人能提升下肢軸線對齊的準確度,降低長短腳、肺栓塞或感染(因使用器械較少)的風險 。
幫助在於「高度的穩定性」與「精準的植入物貼合度」。透過全流程主動式手術機器人系統,能排除人手操作電鋸時難免產生的微小震動與誤差。
機器手臂使用特殊的磨頭進行切削,能讓骨骼切面比傳統鋸切更平整光滑,這意味著 人工關節與骨頭的接觸面會更密合,有助於提升關節安裝後的穩定度與長期耐用性。
CUVIS-Joint 系統具備高度的靈活性。在手術過程中,醫師可以隨時透過 間隙檢測 (Gap Check) 功能,確認膝關節在彎曲與伸直時的鬆緊度。
如果需要,醫師可以在術中即時修改手術計劃 (Plan Changing),調整切骨面積或角度,確保術後膝蓋活動起來既穩定又自然。
可以的。CUVIS-Joint 擁有完整的 3D 術前規劃系統,能針對每位患者獨特的骨骼形狀進行分析。
此外,系統具備 開放式平台 (Open Platform) 設計,相容於全球多家廠商的人工關節植入物。這意味著醫師可以不限制於特定型號,而是為您挑選最適合骨骼條件的人工關節尺寸與材質。
References